分身ロボもどき #IT_Party
友人の頑張りにより本州最西端でITパーティーが開かれました🎊
connpass.commargaritan.hatenablog.com
最近オリィ研究所にはまっている私はRaspberry Pi を用いた自作分身ロボットについてお話させていただきました。
今回のブログでは実演に用いた分身ロボットの作り方を中心に書いていきたいと思います。早速ですが、Raspberry Piを遠隔操作するために「TeamViewer」というアプリを導入します。ラズパイ関係なく簡単にPCの遠隔操作が可能になるのでおすすめです。
次に回路・ハード周りを構築していきます。
基本的には周南ロボコンの時に参考にした「ZeroBot」と同じ構成です。
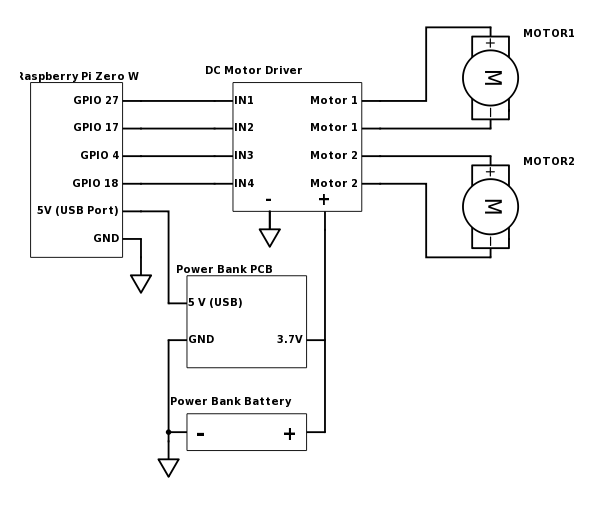
https://hackaday.io/project/25092/instructionsd
電源周りは面倒なのでモータードライバーに単3電池4つを直列に繋ぎ
モータードライバーはBanggoodから輸入いたしました。
ブレッドボードやジャンパーピンで回路を繋ぎ
タミヤ製品を使いながら適当にハードを完成させます。
そしてロボット駆動用のGUIを作ります。
Tkinter を使い4つのボタンを配置。
そしてそれぞれ呼び出す関数を定義し
GPIOピンを直接制御します。
Raspberry Pi のGPIOをPythonから利用する - Qiita
こちらが最終的なプログラムです。
最後にストリーミング。
Raspberry Piと動画モニタアプリMotionで、晩ご飯作成風景を家庭内ストリーミング配信する - Qiita
今回はぎりぎりのスケジュールでしたので、ラズパイのストリーミング配信をラズパイ上で表示させるという頭の悪そうな事をしています。ここはぜひより良い方法を探して教えて下さいますようお願いしておきます。

そんなこんなで現時点の分身ロボットの出来上がりでございます!発表本番でも自宅にロボットを置いた状態で発表会場から動かすということができ、喜んでいただけたようなので良かったです(本当は会場に分身を置いて自宅から参加したかったw)!
分身として使う為の音声周りの機能追加やハードのデザイン向上などやるべき事はまだまだありますが、マイペースにやってまいります🍵